Phruler背后的技术

核心原理:运动视差
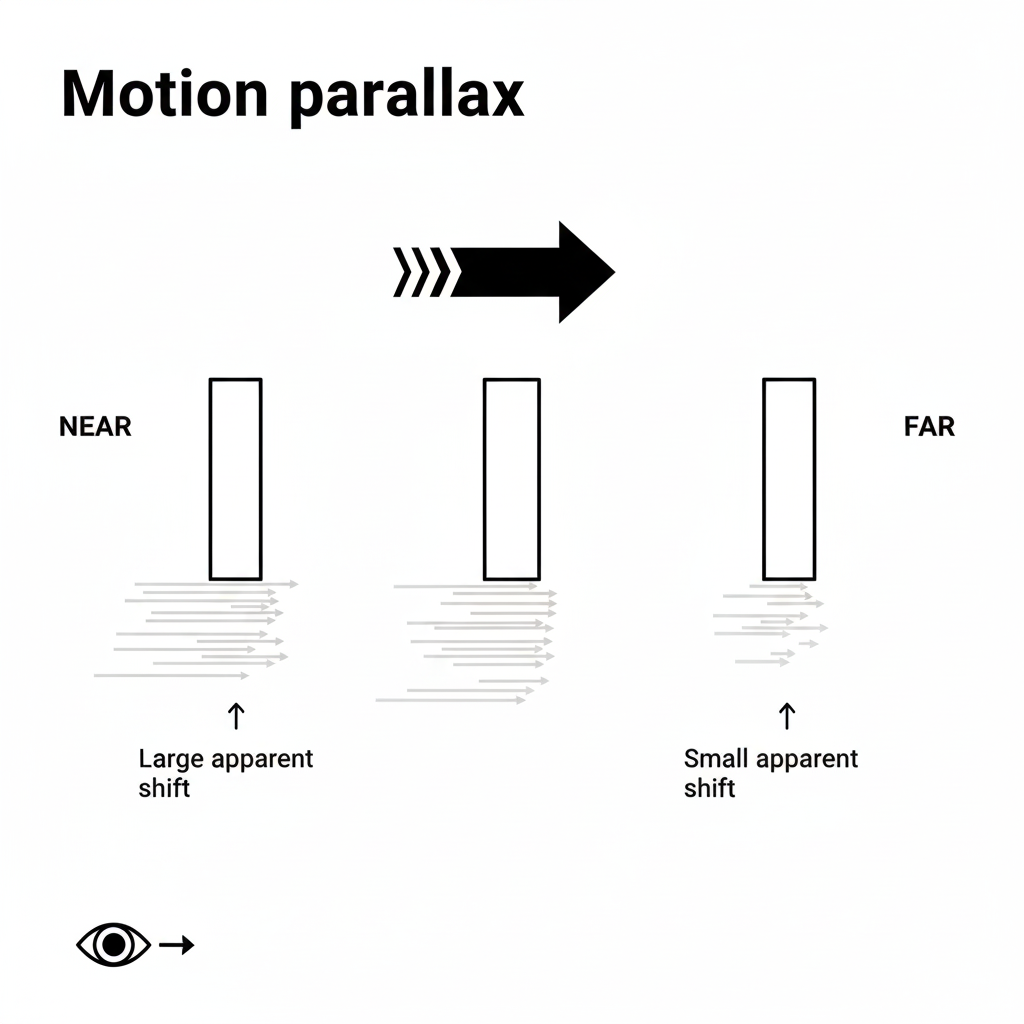
首先,了解Phruler所基于的核心科学原理非常重要:运动视差。这是您每天都会体验到的基本光学概念。想象一下从行驶的汽车窗户向外看:像栅栏柱这样的近处物体似乎飞速掠过,而远处的山脉几乎不动。这些物体在您视野中的明显位移会根据它们与您的距离以不同的速率发生。这种差异运动为我们提供了关于世界3D结构和观察者在其中运动的大量数据。
应用:强大的视觉引擎
Phruler将这一原理转化为一个强大的计算引擎。它利用您设备的相机识别并锁定您周围成千上万个独特的特征点——桌子的角落、地板上的图案、画框的边缘。当您移动手机时,它不仅仅是看到一个视频;它正在高速分析这些点中每一个点相对于所有其他点的移动方式。这种复杂的视觉分析正是为什么Phruler需要在光线充足的环境中激活相机的原因;它能清晰看到并跟踪的独特视觉特征越多,确保精确测量的数据就越多。
验证:智能传感器融合
然而,Phruler的智能并不仅限于相机。它智能地将视觉数据与您设备其他强大传感器的输入融合,以不断验证其工作。它使用:
- 加速度计和陀螺仪来获取您手机运动的原始读数,并将这些数据与从运动视差得出的计算结果进行交叉引用。
- LiDAR扫描仪(在支持的设备上)提供精确的深度映射功能,作为额外强大的验证层。
这种持续的检查与平衡系统确保了卓越的准确性和可靠性。